Smart Chessboard
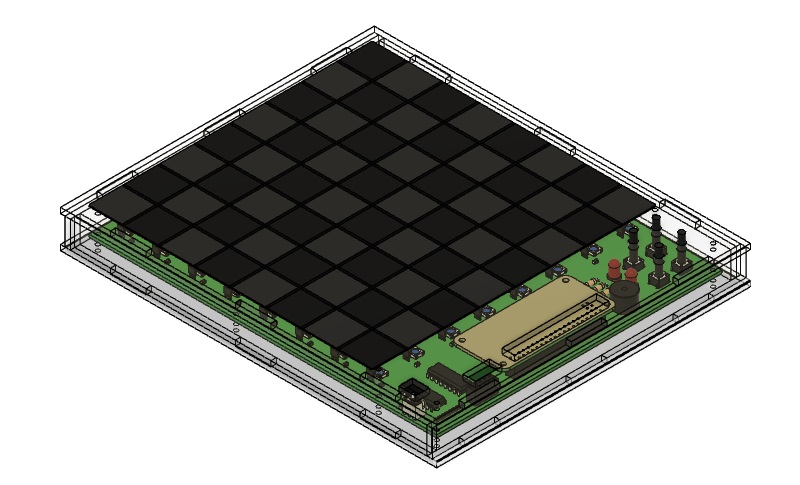
Software flow
The system operates in a continuous loop, alternating between user and bot turns, with validation and feedback mechanisms at each step.
Here is the software execution flow:
- Start - Initialize the system and check all sensors
- Scan 8x8 hall sensor array - Continuously monitor the chess board for piece movements
- Check if user moved a piece
- If No: Return to step 2 (Keep monitoring the chessboard)
- If Yes: Proceed to step 4
- Validate if the move is legal
- If No: Sound the buzzer and return to step 2
- If Yes: Proceed to step 5
- Check for end game condition after user move
- If Yes: Sound the buzzer and stop the game
- If No: Proceed to step 6
- Light up LEDs to indicate the user move - Provide visual feedback
- Pass the move to the chess engine - Calculate the bot’s response
- Light up LEDs to indicate the bot move - Show the user the bot’s calculated move
- Check for end game condition after bot move
- If Yes: Sound the buzzer and stop the game
- If No: Proceed to step 10
- Check if user played the bot move correctly
- If No: Return to step 10 (Wait for correct execution)
- If Yes: Return to step 2 (Start next turn cycle)
- Stop - End the game when end game condition is met
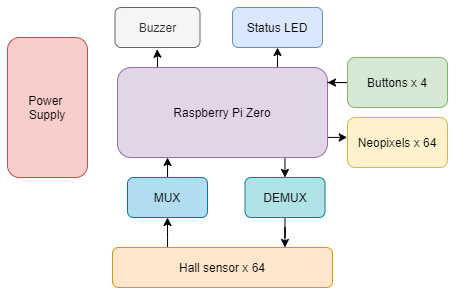
Hardware block diagram
Repository layout
|Directory|Description of contents| |–|–| |board|PCB design files| |code|Raspberry Pi Zero firmware| |docs|Design related documents| |enclosure|Enclosure design files| |gui|GUI application built using Python 3|
Ideas for further development
- Connect the chessboard via the internet to another computer
- A 2 axis linear guide setup using stepper motors to move chess pieces using an electromagnet
- RFID based chess piece identification. Scan achieved using an array of 8 RFID readers mounted on a linear guide